
CODESYSによるPLC連携
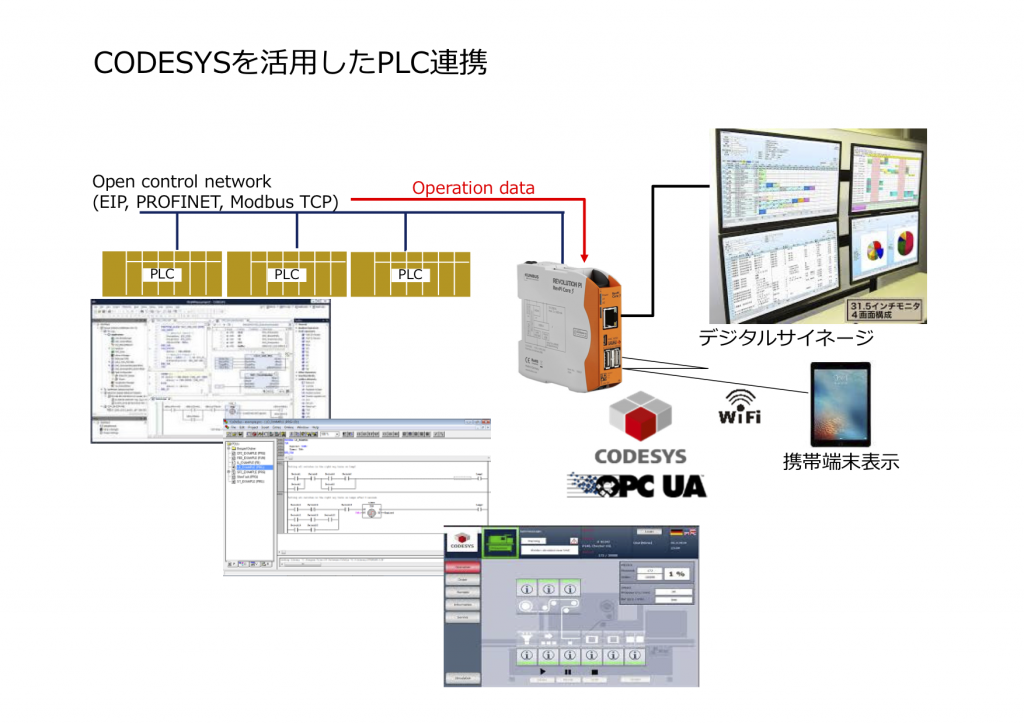
独最大手ソフトウェアPLC CODESYSは制御プログラム、HMI(Web GUI)、フィールドバス通信の3つの機能を統合したオートメーションソフトウェアです。CODESYSを産業用ラズベリーパイ RevPiシリーズまたは MICA-R4シリーズにインストールすれば、コストを抑えて簡易PLCが作れます。CODESYS上では、Ethernet/IP、PROFINET、EtherCATといった世界標準の制御プロトコル経由で他のPLCと制御データを共有できます。また、制御プログラムも制御エンジニアが得意なラダーやファンクションブロックといった言語で記述できます。
本事例はCODESYSパッケージに含まれるWebベースGUIツールを使って、RevPiでPLCと共有している制御データをグラフィック画面上に表示するというものです。CODESYSのWeb GUIツールで作成したグラフィック画面は、HDMI経由で大型ディスプレイに直接表示させることができ、ブラウザが入った他のPCやタブレット端末でもリモートで表示できます。
エッジコンピューティング
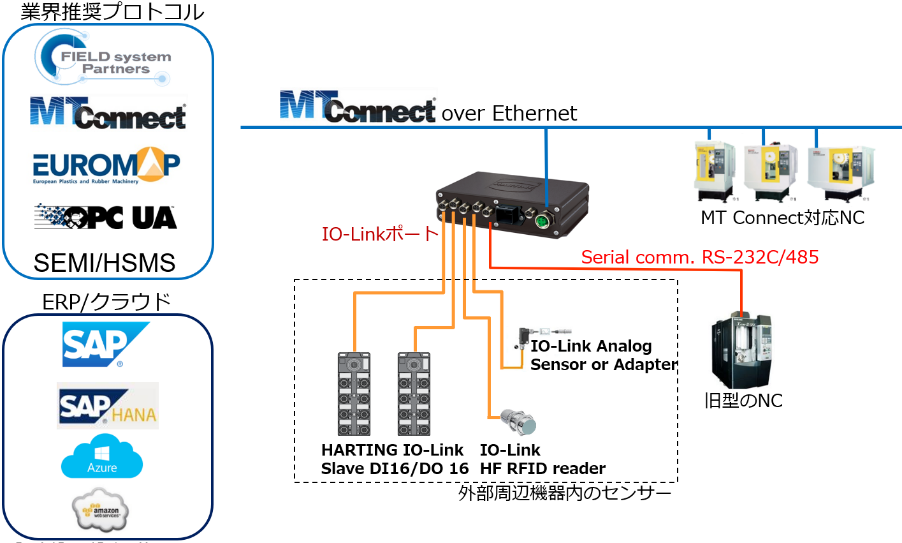
本案件では、製造ラインの中の工作機械の周辺装置(オイル循環ユニット)内のセンサ及びシリアルポートしかない旧型のNCのデータをMICA-R+IO-Linkカスタムボードで受け、米国工作機械業界団体によって標準化されているXMLベースの設備状態監視ネットワークMT Connectに渡しています。
MICA-Rカスタムボードを活用すれば、様々なインターフェースを持つ現場設備とMICA-Rを直接つなぐことができます。またイーサーネット経由でつながる上位系ネットワークは、MT ConnectやEUROMAP、OPC UAなどの業界標準ネットワークはもちろん、MQTT等のメッセージングプロトコルでマイクロソフトやアマゾンのクラウドサービスへデータを送ることも、ラズパイ用プロトコルスタック、ミドルウェアを活用することによりコストをかけずに実現できます。
画像処理

産業用ラズベリーパイMICA-RとUSBビジョンカメラを接続すると5万円以内でテーラーメイド画像認識システムが簡単に構築できます。本案件では、自動車の組立工程に必要な画像処理ニーズに対し、オープンソースソフトウェアOpenCVを活用してカスタムアプリケーションを開発します。具体的にはQRコードの斜め読み、位置検出、形状認識、作業者検知、ロボットへの部品位置情報の伝達プログラムを開発しました。作業者検知等は人によって体格が違うので機械学習を入れる必要がありますが、それ以外はすべて数学的な処理のみで高い再現性と検知率を実現できます。
OpenCVは最先端の画像処理研究でも使われるデファクトスタンダードの画像処理ツールです。もちろんラズパイベースの画像処理は、数千万画素のカメラと高速演算用コンピュータを使った数百万円以上の市販の画像処理システムとは性能面で比較になりませんが、本事例のよう人間が行う単純目視工程を代替するための画像処理ニーズ等においては、ラズパイベースのカスタム画像処理は圧倒的なコストとカスタム開発自由度の優位性があります。
MEMSセンシング:設備故障兆候検知・予知保全
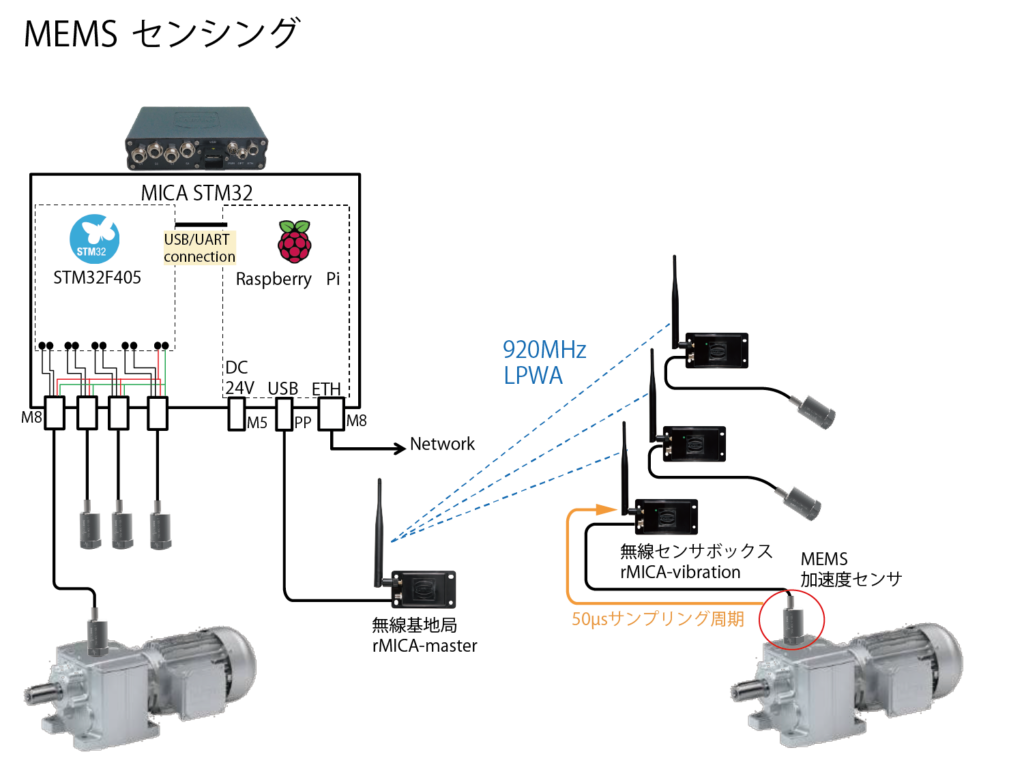
最新MEMSチップを実装したハーティングMEMS加速度センサsMICA-ACCを用いて、モーターの故障診断・予知保全を行った事例です。モーターに取り付けられたMEMS加速度センサは、直接STM32マイコン内蔵の産業用ラズベリーパイMICA-R STM32 SENSOR / MICA-R4 SNESORに取り付けることもできますし、無線センサボックスrMICA-vibrationにつなぐことも可能です。本案件では、無線センサボックスrMICA-vibration(子機)を経由し、920MHzサブギガ帯通信でサンプリング間隔50μs、1回の計測点数2万点弱の計測データを約300kbpsでMICA-Rに取り付けられた無線基地局rMICA-master(親機)に送っています。計測頻度は一日5回程度ですが、この頻度であれば3-5年は無線センサボックスrMICA-vibrationのバッテリ交換なしで稼働できます。
MICA-Rで受信した生データは、ラズパイ上のオープンソフトウェアScipyで随時、高速フーリエ変換、エンベロープ変換などの数学的処理を行い、グラフ描画、故障判定、上位系(お客様のサーバー)へのデータファイル送信を行います。
各モーターの機械定数データベースを必要としないにも関わらず、運転開始時の正常状態から継続して故障評価インデックスを計測、比較することにより、非常に高い精度の故障事前検知が可能です。MICA-R用状態監視アプリケーションはソースも含め無償公開しておりますので、画面構成、判定アルゴリズム、機械学習ロジックの追加などのカスタマイズも自由に行うことができます。
AGV制御
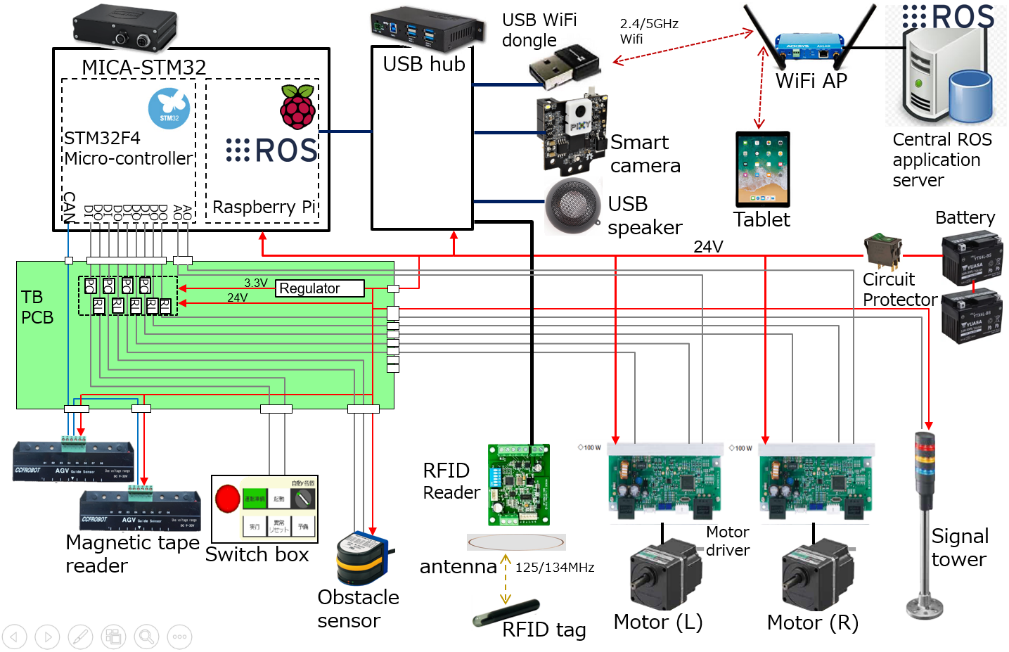
ロボコン競技会で学生たち作る高度な移動ロボットでも実証されていますが、数千円の汎用マイコンボードを使えばAGVをはじめ様々な複雑な移動ロボットを自由に制御できます。本案件ではマイコン内蔵産業用ラズベリーパイMICA-Rを使い工場内工程間搬送用AGVの制御系を開発しました。内蔵STM32マイコンは床の磁気テープを検知する磁気センサ、障害物センサ、モーターエンコーダを読み取り、左右のブラシレスモーターに送る速度指令出力を生成します。一方、スマートカメラや床に埋め込まれたRFIDタグを読むRFIDリーダーはUSB接続でラズベリーパイ側に接続され、マイコンと連携してAGVの制御に反映されます。AGVの運転操作・ティーチングは専用のWeb GUIを設けていますので、WiFi接続されたタブレット端末のブラウザ上で行うことができます。
さらに米スタンフォード大で生まれ、世界中のロボット研究者たちの間でデファクトになったロボット制御のためのオープンソースミドルウェアROSをラズパイ上で稼働させ、中央のROSアプリサーバー経由で多数のAGVの高度協調制御を行います。大学研究室レベルの高度ロボット制御が、1台のMICA-Rとオープンソースソフトウェアで実現できます。
現在、STM32を搭載した汎用制御用のMICA-R4にはMulti IOモデルがあります。