
边缘计算机
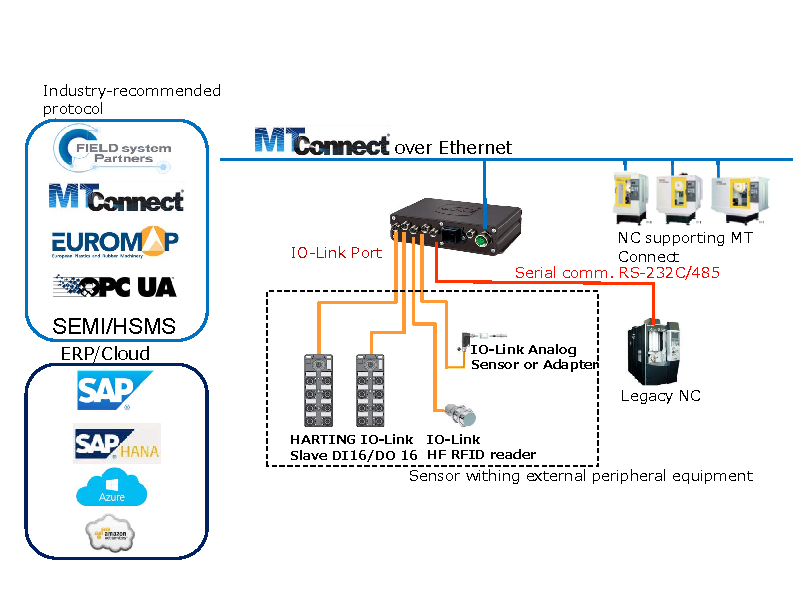
在本案例中,MICA-R_IO-Link 自定义板接收了在生产线中机床外围设备(油循环单元)中只有传感器和串行端口的旧 NC 数据, 然后传递给 MT Connect,这是由美国机床行业协会标准化的基于 XML 的设备状态监控网络。
灵活运用MICA-R自定义板,可将拥有各种接口的生产车间和MICA-R直接连接起来。此外,以以太网连接的高级类网络,例如MT Connect和EUROMAP、OPC UA等业界标准网络,也可通过活用树莓派用协议栈和中间件,低成本地实现以MQTT等讯息传输协定向微软和亚马逊的云服务输送数据。
图像处理
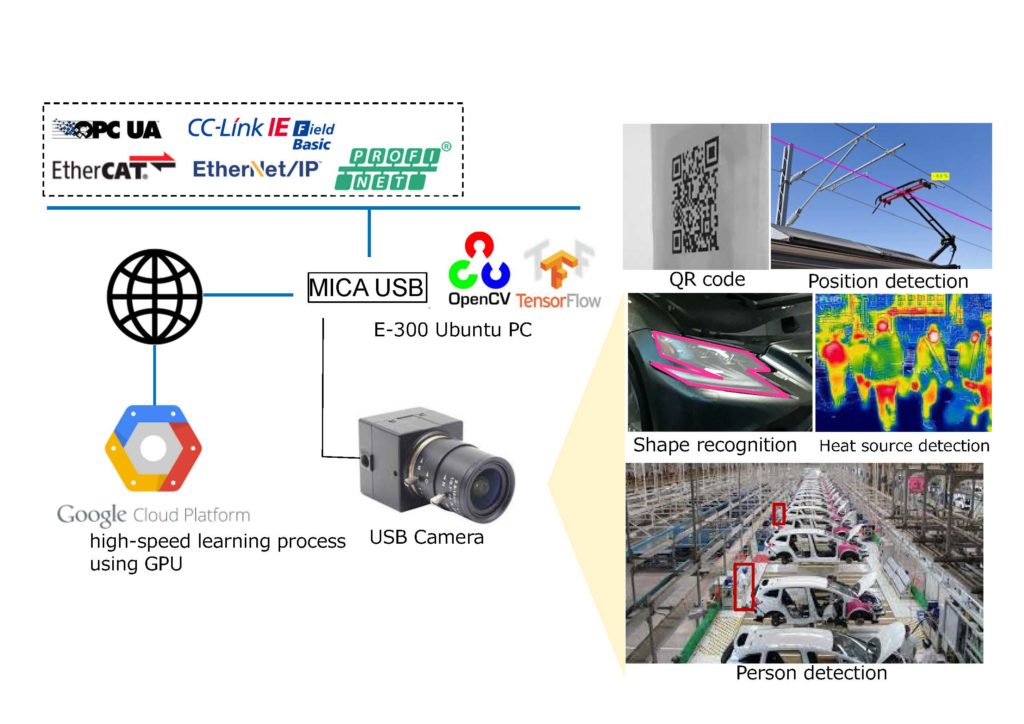
只要花费5万日元以内,就可以轻松连接工业用树莓派MICA-R和USB视觉相机,构建定制图像识别系统。在本案例中,我们将利用开源软件 OpenCV 研发自定义应用程序,以满足汽车装配过程中所需的图像处理要求。 具体来说,我们开发了二维码速读,位置检测,形状识别,辨识操作人员,面向机器人的零件位置信息的传输程序。除了像辨识操作人员等,需要加入特殊的机器学习程序以外,其他程序只需要通过数字处理就可以实现高可重复性和高检测率。
OpenCV是一种在最先进的图像处理研究领域的标准图像处理工具。当然,树莓派的图像处理功能无法比拟使用了数千万像素的摄像头以及高速演算用计算机的售价数百万日元以上的图像处理系统,但是像用图像处理取代人工简单目测操作的案例,树莓派为基础的自定义图像处理有绝对的成本上和自定义开发上的优势。
通过CODESYS与PLC合作
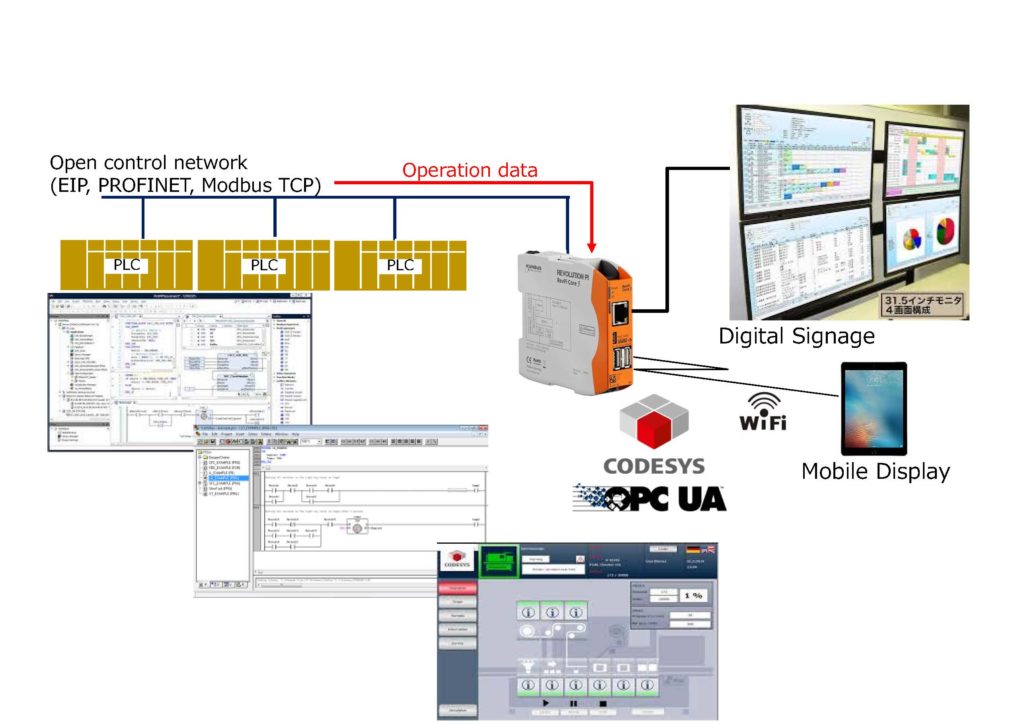
将德国最大型软件PLC CODESYS安装在工业用树莓派RevPi Core 3上即可制作成本大约3万日元一台的迷你PLC。在CODESYS上,可以通过Ethernet/IP,Profinet,EtherCAT等世界标准的控制协议,和其他的PLC共享控制数据。另外,控制程序也可以用控制工程师擅长的梯形和功能块等语言编写。
本案例是使用CODESYS包装里包含的基于Web的GUI工具,实现与 PLC 共享的控制数据的可视化。CODESYS的Web GUI工具制成的图解屏幕,可以通过HDMI在大型显示器上直接显示,也可以在装有浏览器的PC和平板电脑上显示。
MEMS传感检测
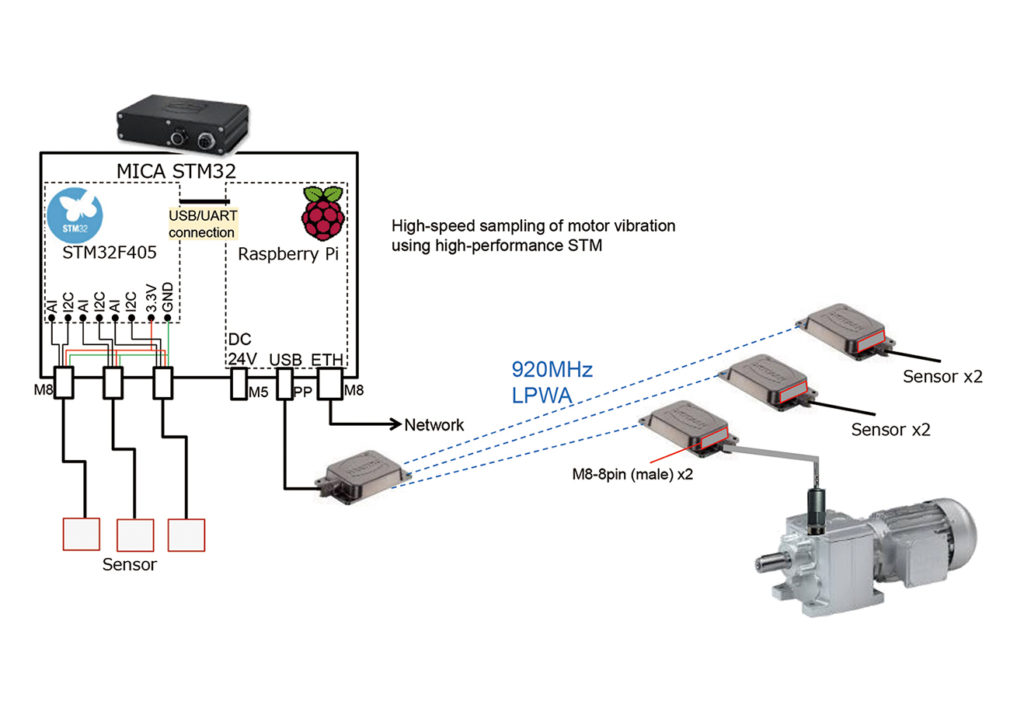
本案例是介绍使用安装有最新MEMS芯片的浩亭MEMS振动传感器,进行发动机的故障诊断・予知保全。发动机上安装的MEMS振动传感器,可以直接安装在内设微型多用计算机的工业用树莓派MICA-STM32-vibration上,也可以连接在无线传感器盒rMCIA-vibration上。本案例是通过rMCIA-vibration,在920MHzSub-GHz带通讯的情况下,将抽样间隔50μs,以约 300kbps 的速度将大约20000 个测量点发送到连接在工业树莓派 MICA-R 的无线接收器 rMICA-master上。 如果设定测量频率约为每天 5 次的话,可以在不更换电池的情况下持续运行3-5 年。
MICA-R接收的原始数据在树莓派上的开放软件Scipy上,可以随时进行高速傅里叶变换,包络线变换等数学的处理,进行图形绘制,故障判定和向上级系统(客户服务器)发送数据包。
尽管不需要各个发动机的机械常量数据库,但是通过运转开始时的正常状态到测量并评价故障评价指数,可以实现高精度的故障事前检测。用户可以使用免费提供的状态监测应用程序,自由操作屏幕配置,判断算法,机器学习逻辑的添加等定制任务。
AGV控制应用
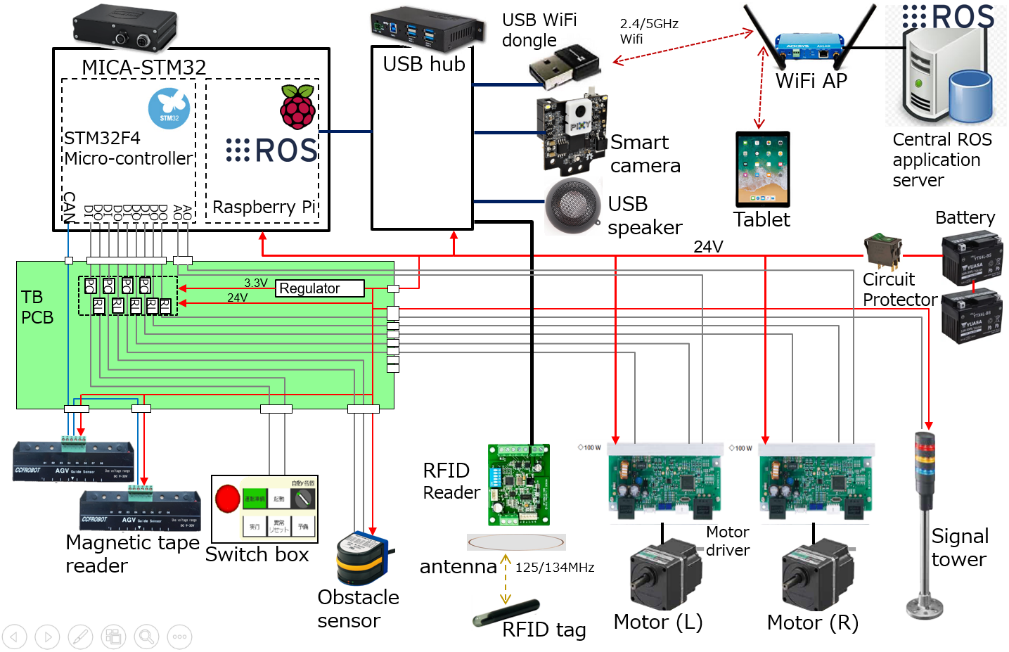
我们在机器人大赛上学生们制作的高级移动机器人中看到,使用数千日元的通用微型多用计算机可以自由控制AGV为代表的各种复杂的移动机器人。本案例中,我们研发了一种使用微型计算机集成工业树莓派 MICA-R STM32 控制在工厂间运输 AGV 的控制系统。内置的STM32微型多用计算机读取可以检测磁传感器,障碍物传感器和发动机编码器,生成发送给左右两边的无刷发动机的速度指令。另一方面,读取在智能摄像头和内嵌式RFID标签的RFID读取器通过USB和树莓派连接,和微型多用计算机协作完成AGV控制。AGV的运行操作・修正设有专用的Web GUI,所以在连接WiFi的平板电脑的浏览器上也可进行操作。
另外,我们把在美国斯坦福大学研发的,被大量机器人科研人员应用于机器人控制的开源中间件ROS 结合在了树莓派上,通过中央的ROS应用程序服务器进行大量的AGV的高度协调控制。大学实验室级别的高度机器人控制,通过1台MICA-STM32-control和开源软件即可实现。