
Edge Computing
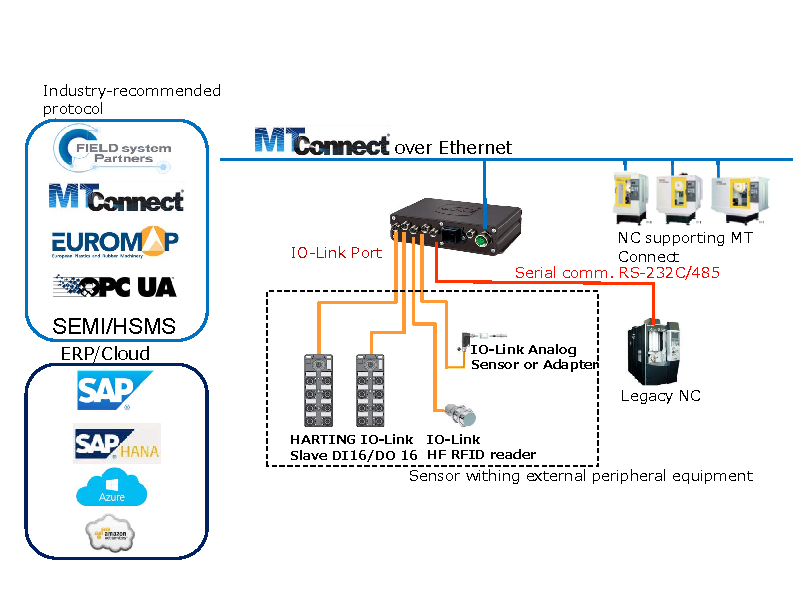
In the case presented above, tool machine auxiliary unit sensors and an outdated CNC with a serial port can be connected to MICA-R with IO-Link custom board. The MICA-R can then transfer the data to MT Connect, an XML-based machine monitoring network protocol that has been standardized by a US industrial association.
By utilizing MICA-R custom boards, field devices with various types of interfaces can be directly connected to networks. Opensource protocol stacks, or middleware, offers data conversion tools which allow industrial protocols such as MT Connect, EUROMAP, OPC-UA and messaging protocols like MQTT a standard way to connect to major commercial cloud services such as Microsoft Azure or Amazon Warehouse Services.
Image Processing
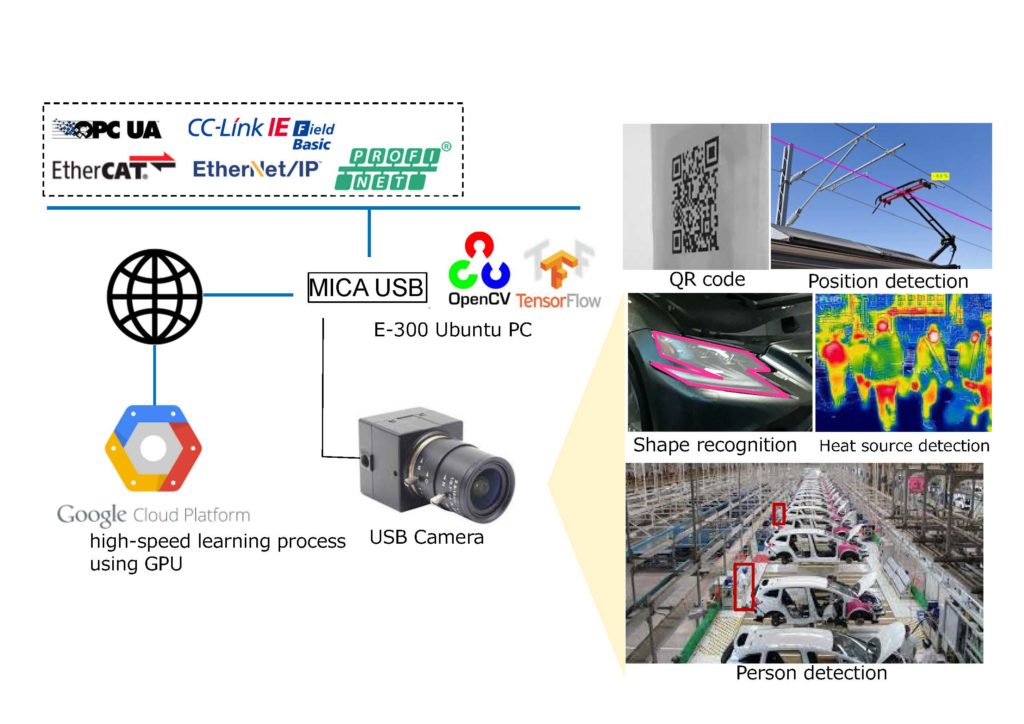
With an Industrial Raspberry Pi and an affordable USB vision camera, a tailored computer vision system can be made for less than US$500. In the case presented above, we developed a custom application using OpenCV which can diagonally read QR codes, detect positions, share what the camera is recognizing, detect workers, and inform robotic arms where parts are located. While machine learning was required to learn worker detection, we only needed to apply mathematical algorithms to the other applications to achieve higher accuracy and repeatability. Together, these skills helped automate an automotive assembly process.
OpenCV is the defacto tool used in computer vision research. Of course, our computer vision system, which is based on a Raspberry Pi, does not perform as well as an expensive computer vision system with a high-end camera and a highspeed computer. However, our system has significant advantages in cost and developmental flexibility for such simple applications. As it the case above, it can effectively replace human eyes.
PLC Integration with CODESYS
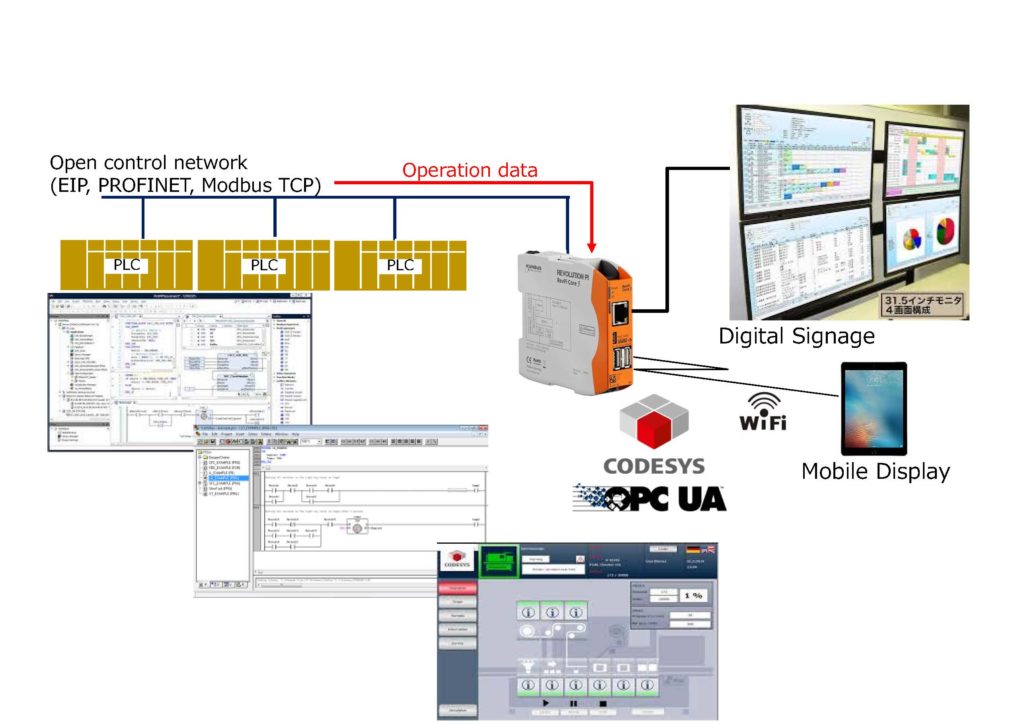
By installing CODESYS, a German software-PLC, into our Industrial Raspberry Pi, RevPi Core 3, a mini PLC can be created for less than US$400. With CODESYS, a RevPi Core 3 can share control data with other PLCs via Ethernet/IP, Profinet, or EtherCAT. In addition, control programs can be written with either ladder or function-block language, making the RevPi Core 3 easily used by control engineers.
In the above case, the WebGUI tool included in the CODESYS package is used to display control data shared with PLCs in the production line. The graphics made with the CODESYS WebGBU tool can be placed on a large display via HDMI as well as access remotely via a web browser of PCs or tablets.
MEMS Sensing
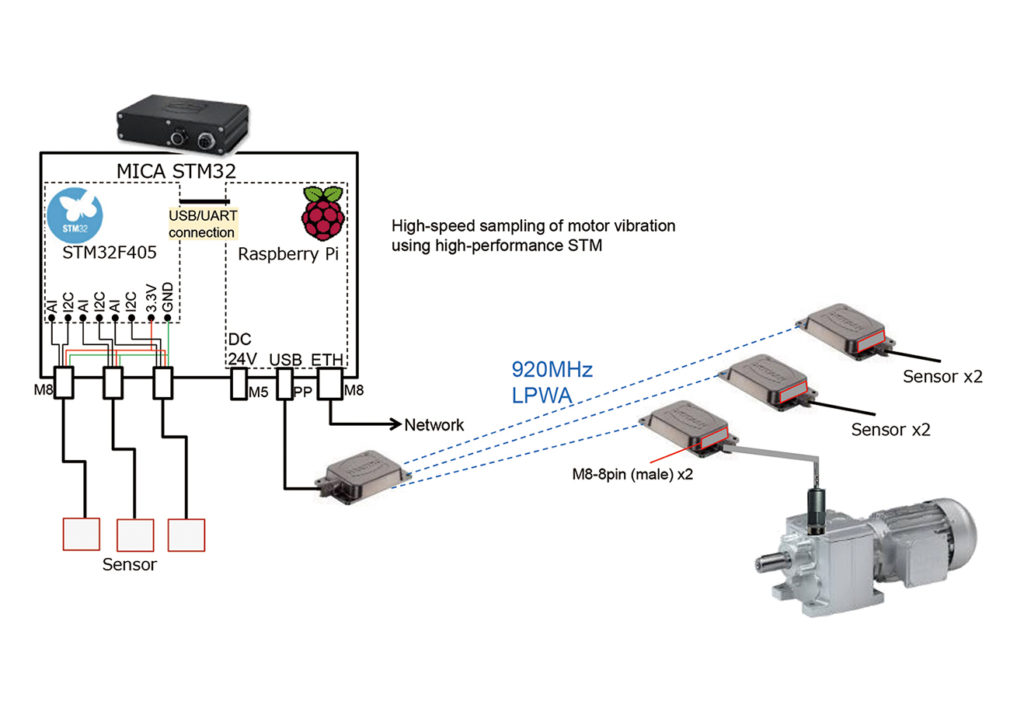
Above case describes how to use our MEMS vibration sensor to monitor the condition of motors, allowing for predictive maintenance. The MEMS vibration sensor attached to a motor is directly connected to either MICA-R STM32 SENSOR, a microcontroller-integrated Industrial Raspberry Pi or rMICA-vibration, a wireless sensor box.
In this case, over 15,000 data sets sampled by rMICA-vibration at a sampling interval of 50 microseconds, are wirelessly sent to a rMICA-master. If the measurement frequency is set to five times per day, the expected the battery life is 3 to 5 years.
When raw data is received by the MICA-R, it is immediately processed by open source software, like SciPy, which applies mathematical algorithms, such as FFT or envelope transformation. After plotting and evaluating the results, the data files are then sent to an external server, usually a customer’s database. Without knowing the mechanical parameters of the motors, our algorithms can still accurately detect early defects by continuously comparing defective index values with initial vibration samples. Because our MICA-R motor condition monitoring software is open source, customers can freely customize the GUI, detection algorithm, or add additional features such as machine learning.
AGV Control
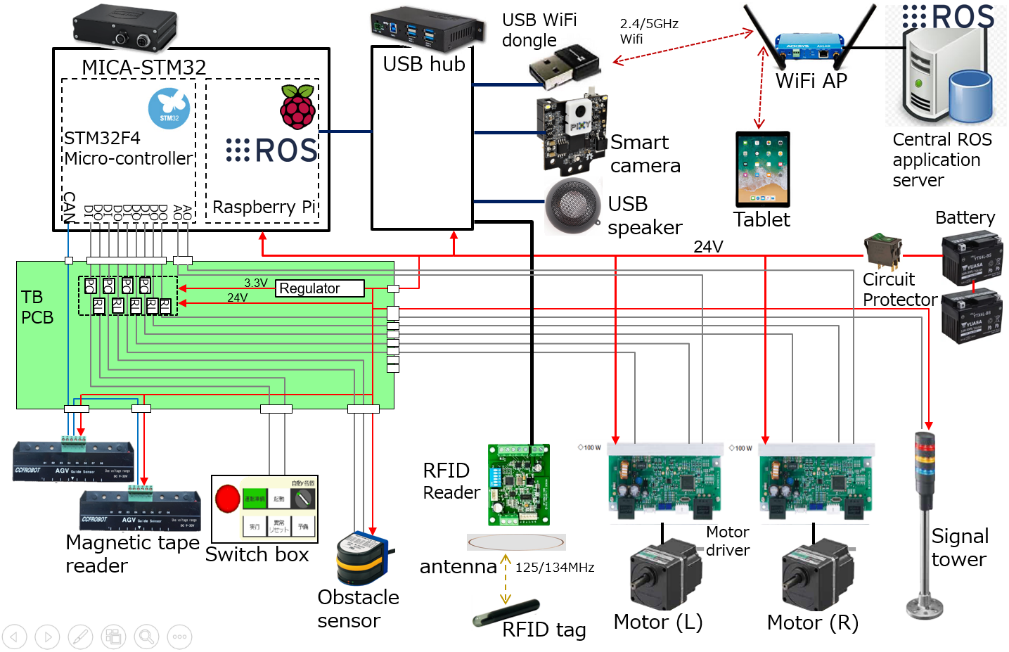
For several years, sophisticated robots at high school robot competitions have been run by microcontroller boards that cost as little as US $20. In the case presented above, we use microcontrollers integrated with Industrial Raspberry Pis to create a control system for industrial AGVs carrying goods on a plant floor. The magnetic sensor in the MICA-R STM32 CONTROL detects magnetic tape on the floor, which the microcontroller combines with information from the collision sensor and motor encoder to generate a target speed for the right and left motors. At the same time, a smart camera and a RFID reader detect RFID tags buried in the concrete floor. This information is passed along to a Raspberry Pi, which collaborates with the STM32 to lead the AGV to its intended destination. Our WebGUI allows users to operate and teach AGVs on tablet connected to a browser via WiFi.
ROS (Robot Operating System) is open source middleware for robot control that was invented at Stanford and has become the defacto standard among robot researchers and developers worldwide. We have proven that ROS can be run on a MICA-R STM32 CONTROL. Using our system, ROS-node Raspberry Pi controllers publish and subscribe ROS topics, sharing the status of each AGV. The central ROS application server can then optimize the operation of many AGVs. Such laboratory-level robot control can be realized with a single device, the MICA-R STM32 CONTROL and our associated open source software.